 �˲���)
�˲���)
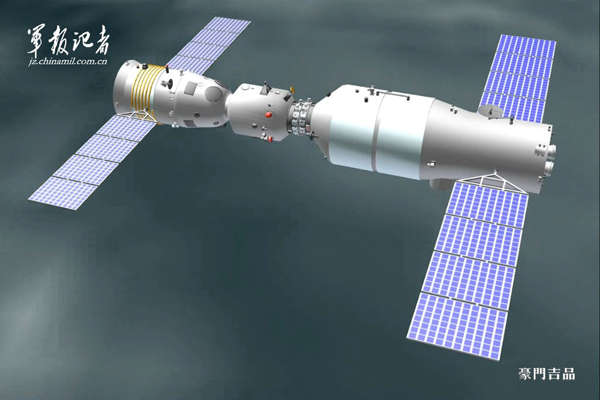
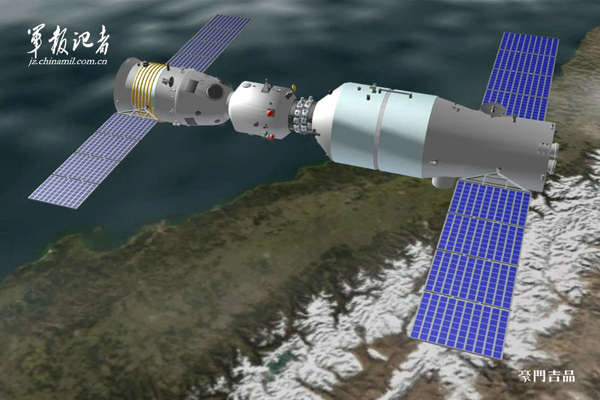
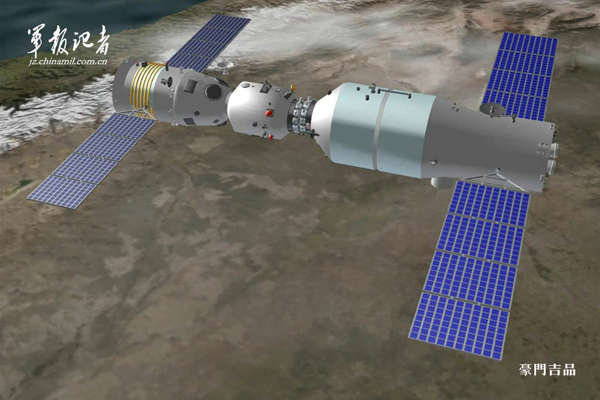
�����ռ佻��Խ��漰������������һ����Ŀ���������һ�����ٷ�������Ŀ����������ȷ������գ��ٷ�������Ϊ����������ȥѰ��Ŀ����������н���Խӡ��ڽ���Խӹ����У��ٷ������ķ��п��Է�Ϊ�����ĸ��Σ�
����Զ�̵�����
�����ڵ����ص�֧���£��ٷ������������ɴα����������뵽�ٺ������ϵ��������ܲ���Ŀ��������ķ�Χ��һ��Ϊ15��100ǧ�ף���
�������̵�����
�����ٷ������������������ͼ�����������õ���Ŀ�������������˶��������Զ�������Ŀ������������ij�ʼ���㣨��Ŀ�������0.5��1ǧ�ף���
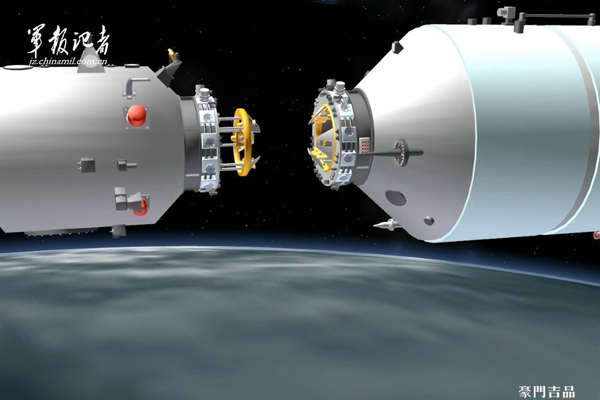
�������ձƽ���
�����ٷ��������Ȳ���Ŀ��������ĶԽ��ᣬ���Խ����߲��ع�����з���ʱ��Ҫ���ٷ������ڹ��ƽ��������Ʒɻ������Խ���Խ����ȣ���ʱ����������֮��ľ���Լ100�ף�����ٶ�Լ1��3��/�롣
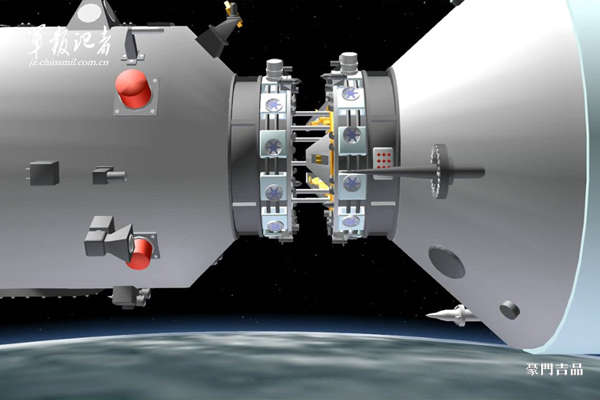
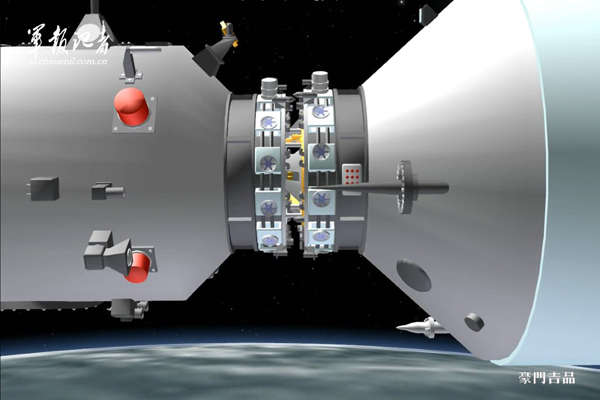
�����Խ�ͣ����
�����ٷ����������������������ͽӽ���������ɵIJ���ϵͳ��ȷ���������������ľ��롢����ٶȺ���̬��ͬʱ����С���������л�����ʹ֮�ضԽ�������Ŀ�����ƽ����ڶԽ�ǰ�رշ���������0.15��0.18��/���ͣ���ٶ���Ŀ����ײ���������˨-������ͬ���ܱ߶Խ�װ�õ�ץ�֡���������������������������ʹ�����������ڽṹ��ʵ��Ӳ���ӣ������Ϣ�������ߡ���Դ�ߺ�������ߵ����ӡ�
|
|
|
|
|
|
|
|
�ͷ����ߣ�86-10-58511234
�ͷ����䣺kf@vip.sohu.com




























����˵�������а�