

|
|
|
��צ������
|
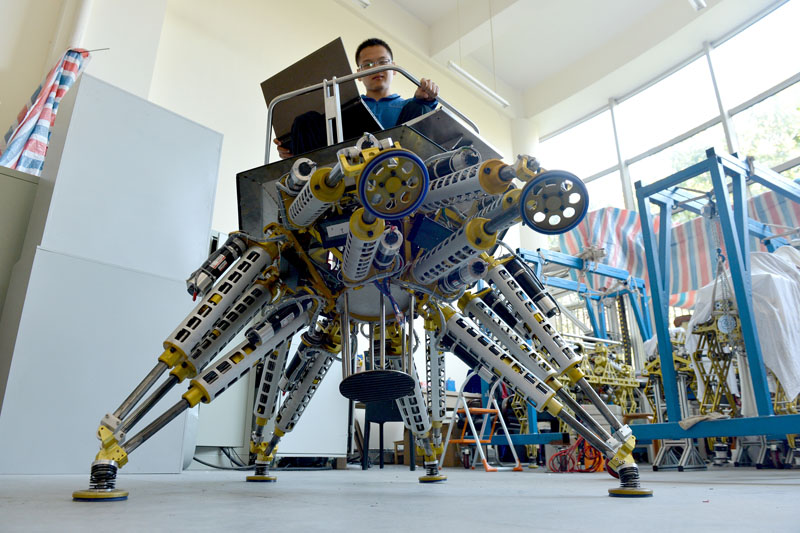
�����������Ϻ�10��28�յ磨���߽���������˵����֩������������������������������������˵��������������
�����������������ˣ�
����Զ������������צ���ڵ�������Ƚ������ߣ�����һ�����㣬��������ڵ���߮�����ۣ����С���������֮�緶���������ǣ��������ڻ�ˮ�ֺ����д��С���Ԯ��ǡ��һλ��η���յ�Ӣ�ۡ�
�����������Ȳ������㣬Ҳ���ǡ��������������ǡ��������������ˣ����Ϻ������˼����е�һ�����¶��������Ϻ������е�붯������ѧԺ�߷���ڴ����Ŷ������з����ɡ�
�������ǡ��¶�������������������ȴ��ͬѰ����������Σ�գ��������������Ӱ�����ƶ�����ġ����㡱�������õĸ��ӻ�����Ӧ���������ں˷��䡢ˮ�ºͻ��ֵȼ��˻�������ɰ��ˡ�������̽��;�Ԯ��ҵ�������ü��������µ�Զ�̾�Ԯ��Ϊ���ܣ���־���ҹ���Ԯ��������������Ƚ����С�
���������������ɾ�Ԯ�����ˡ�
������ij����������ӷ�����𣬻������ӣ�������Ա�����룬���������а��պ�������Ҫ���ȣ��������������ο�չ��Ԯ��
������ij�ط���9�����ϵ��������ϣ�ͨѶ�жϣ��ϱڲ�ԫ���ϵ�������Ĵ������º߷�������������ž�Ԯ��������ε�һʱ���˽�������������վ��ˣ�
����һ��������2011���ձ�����һ��ĺ˵�վ���ѣ��ڸ��¡���ѹ���߷���ļ��˻����½��д����;�Ԯ���������������Ȼ������ܴ����������ʧ��
������Щ�������Σ����ǡ��������������˴�������֮����
�����߷���ڽ���˵����Ԯ��������Ҫ�߱���Ӧ���ֲ�ͬ���λ���������ȶ����˶�����������ʵʱ��֪�������Լ����ɿ������˻�����Эͬ��Զ�̲ٿ���������Щ���Ƿ�����Ԯ�����˵�ǰ�ؼ�����
����Χ����Щǰ�ؼ������߷��Ŷ�����˼��кܸ߳��ء����нϴ����ռ�ķ����������������Ƴ���Ƶ������Ӧ�Ļ������ŷ��˶����ƺ滮������ʵ���˻����˵ĸ��١��߾��ȿ��ơ��������������нϺõĿ��������Ŷ���ƽ���������ܹ������˺�ǿ�����б����ȶ�ƽ�⡣
�������߶˼�����ȫ����װ���ġ���������������Ϊ��Ԯ�����ˡ���ͨ��Զ���˻���ϣ����������뼫�˸���Σ�ջ�������ɰ��ˡ�������̽��;�Ԯ��ҵ�ȶ�������
�����ɱ�400������ڼ����������������
�������������������˸�Լ1�ף������չ�ߴ���1.5��1.5�ף�������������Ȳ���ƣ�ÿ���ȶ�װ��3���������18������������ܸ���400��Ƚſ�ʵ��18�����ɶȱ任���ܹ������ظ��������ȶ����ߣ�ʱ�ٿɴ�1.2ǧ��/Сʱ��
�����߷���ڽ��ܣ���������װ�ڸ������߱������豸�������˿��Գ䵱һ���ȹ̵��ƶ�����ƽ̨��ִ�а��ˡ������ҵ�����á���צ��վ��ʱ���ճ��ġ���צ����ɵ������֡����š�����ţ������¹��ֳ�����ҵ��
������������������������ȫ�ԳƵ���ƣ����Բ���ǰ�������ⷽ������˶���ӵ�к�ǿ�Ļ����Ժͱ����������κ�ʱ������3�������ȵ���Ϊ֧�š������ִ�����ͨѶ�������ֶΣ��������ܶԿ����ţ�ȷ��ִ�����ǵ�ָ����ǣ�����������������ʵ��ġ�֩���������������������������������Σ�յĹ�����
��������������������Զ��ֹ��ˣ����ø��ֲ�ͬ�ķ�������������ˮ�»�������ҵ���ڻ����ֳ����ж���������ɾ�������
�����������������ƹ���¢��
�������л����˼����ڹ�����һֱ�Ƿ�����ҵ����¡����˽⣬������ҷ��������˵�Ԫ������չѸ�٣��ڻ���ϵͳ��������������Ϣ��֪�Ϳ��Ƽ����ȷ�����������ϵͳ�Ļ����о�����Щ�ɹ��ѽ�����Ʒ��ʵ�ýΣ������������Բ�ࡣ
�����߷��Ŷ�2000�����о����������ˣ��Ⱥ������㡢�������������ˣ������ڲ��������������߹����ܶ������ȼ����ϻ����˴������顣2011�꣬�Ŷӻ�ù���863�ƻ��������Ⱥ��о���4�����������С������ˡ���2013�꣬�ֻ�ù���973��Ŀ���˵�վ�������ֻ����˵Ļ�����ѧ���⡱�������Ź�����࣬�˵�վ��Ԯ��������˵�ԭ�ͻ������������������ʵ�ֶ�������
���������������Ǹ߷��ŶӴ�ǰ���Ƶġ��ǻ�С���ֵܡ����ǻ�С�����������������������������ȡ����Ҫ�ɹ���ͻ���˷����������߹����ܶ�Һѹ������״̬��֪�뻷����Ӧ��������̬�滮�붯̬���ƵȺ��ļ�������������������и��١��߸��������ͶԵ��ͷǽṹ�����εĸ���Ӧ������ʹ�ҹ������Ԯ�����˽�������Ƚ����С�����צ���㡱������ȫ����֪ʶ��Ȩ����Ϊ�ҹ������˼�������Ҫ�ɹ���

































����˵�������а�