

四轮转向与自动驾驶到底要怎样打好配合战?
作者 | 山丘
出品 |焉知
业界一直在研究设计用于 AD 路径跟踪的集成底盘控制系统,其中许多研究考虑了电子稳定控制 (ESC) 和主动前轮转向 (AFS) 的集成。ESC 和 AFS 都会产生横摆力矩来增强车辆横向稳定性,但它们的工作方式不同。ESC 通过差动制动产生偏航运动,而 AFS 通过附加转向产生偏航运动。由于两个控制器都会产生偏航运动,因此它们的集成需要仔细研究它们一起工作时的协同效应和冲突效应。比如,使用基于加权伪逆的控制分配方法集成ESC和AFS,产生代数解。或者使用基于零空间的控制重新分配方法集成了直接偏航力矩和 AFS。也有将整合 ESC 和 AFS 作为目标从而制定了一个优化问题,并使用 Karush-Kuhn-Tucker 方法解决了该问题。
随着电动汽车的普及,配备四个独立轮毂电机(IWM)的动力总成系统引起了汽车行业的关注,比如比亚迪最近爆火的仰望系列车型的独立四轮转向就是十分收到业界关注的部分。这种四轮转向系统支持扭矩矢量分配 (TV),因为四个车轮上的纵向力可以任意组合,每个车轮独立提供牵引力、制动力或零力。与 ESC 不同,扭矩控制TV 可以在不使车辆减速的情况下产生偏航运动。事实上,可以轻松准确地估计电机的输出扭矩,这是配备 IWM 的电动汽车用于扭矩控制TV控制实施的另一个优势。
最近,人们在开发路径跟踪算法方面做出了很多努力,因为它们对于自动驾驶(AD)操作(例如车道跟随、变道和避免碰撞)至关重要。基于运动车辆模型的方法包括纯追踪法和斯坦利法。然而,由于不考虑车辆的动力学,这些方法可能无法正确解决车辆发生严重横向运动时可能出现的稳定性问题。其次,基于动态车辆模型的方法可以克服运动学方法的稳定性问题。模型预测控制(MPC)、线性二次调节器(LQR)等多种控制方案;H-无穷大、模糊和遗传算法也已被采用来实现可靠的路径跟踪能力。
实际上,MPC 与 LQR 类似,两种方法都通过解决优化问题来计算控制值。然而,MPC 在每个样本的较小时间窗口中解决优化问题,而 LQR 使用在整个时间范围内离线计算的单个最优解。MPC 可以处理非线性模型和约束,而 LQR 则不能。对有限数量的样本(包括当前步骤和几个未来步骤)进行优化后,MPC 仅采用当前步骤的解决方案进行控制操作。通过在每个样本中重复执行此操作,MPC 能够预测未来事件,这是其他传统控制器(例如 PID)所不具备的。
采用具有多重约束的MPC进行转向控制,比如,考虑了轮胎力的约束并应用 MPC 进行车道变换控制, 可以避免与前方车辆发生碰撞。同时,考虑了电动助力转向系统的特点,利用MPC可以实现快速响应的转向控制。将非线性模型预测控制(NMPC)应用于转向和制动控制,可以开发有效的避障逻辑。与任何其他线性控制设计方法类似,当驾驶条件显着偏离模型线性化的设定点时(例如,当车速变化较大或偏航运动变大时),MPC 的性能可能会恶化。NMPC 可以解决这个问题,因为它允许模型、成本函数和约束中存在非线性。然而,NMPC 的这种多功能性可能不利于控制目的,因为非线性优化问题可能是非凸的,并且可能无法很快找到其最小值。
本文算法
为了解决以上这些问题,提出了自适应模型预测控制 (AMPC) 。该模型是 MPC 的另一种变体,可以更新质量、侧偏刚度和速度等模型参数。采用AMPC进行路径跟踪时,需要考虑轮胎侧偏刚度和路面摩擦力,以及转向系统的动态特性进行控制。同时,将车辆模型分为低速模型和高速模型两类,并将AMPC应用于高速模型来实现转向控制。
已经有很多关于提高横向底盘控制中的车辆稳定性的研究,也有很多关于提高智能驾驶系统AD中的路径跟踪性能的研究,但同时考虑两者的研究却很少。随着自动驾驶技术的进步,这两个目标应该一起考虑,因为它们都对自动驾驶车辆的安全性做出了重大贡献,但往往以相互矛盾的方式影响彼此。
为了解决以上这些问题,本文介绍了一种用于具有四个独立轮毂电机(IWM)的自动驾驶车辆的集成自动驾驶(AD)控制系统。系统由AD控制器和底盘控制器两部分组成,这些元件在功能上集成在一起,以提高车辆稳定性和路径跟踪性能。
智驾系统执行端的规控策略
1、车辆模型
本章介绍本研究中使用的车辆模型,使用两种不同的模型来设计集成AD控制系统。由于 AFS 仅通过转向动作影响车辆的偏航运动,因此 AFS 使用了 2 自由度 (DOF) 车辆模型,该模型考虑了响应前转向角的横向车辆运动。由于 TV 通过在四个车轮上设置不同的旋转扭矩来实现偏航运动,因此 TV 使用了考虑每个车轮的车轮旋转动力学的 7-DOF 车辆模型。
1.1、用于路径跟踪的车辆模型
图 1 显示了AFS使用的经典 2-DOF 车辆模型,也称为自行车模型,它考虑了横向平移运动和偏航运动。该车辆模型为2自由度,如下方程是相应的运动方程。

图1 二轮转向控制模型
1.2. 扭矩矢量车辆模型
图 2 显示了用于开发 TV 控制器的 7-DOF 车辆模型。
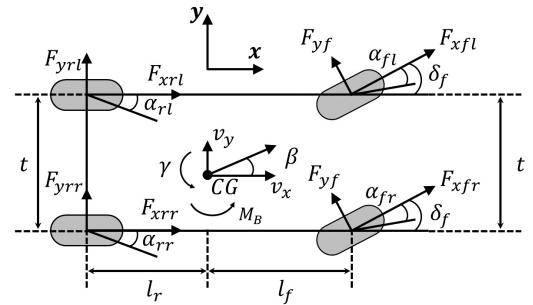
图2 四轮转向控制模型
该模型由三个代表车身动力学的方程和四个代表车轮动力学的方程组成。此处无法使用上一节中的 2-DOF 车辆模型,因为它不包含实现 TV 控制逻辑所需的车轮动力学。相反,7-DOF 车辆模型不适合 AFS 控制器,因为 AFS 不需要考虑车轮动力学。通常的做法是使用最低阶车辆模型进行控制器设计,因为它可以最大限度地减少在实际电子控制单元 (ECU) 上实现控制逻辑时的计算负载。
2、AD控制器
下图 3 显示了为本研究设计的集成 AD 控制系统的总体架构。它由AD控制器和底盘控制器组成。
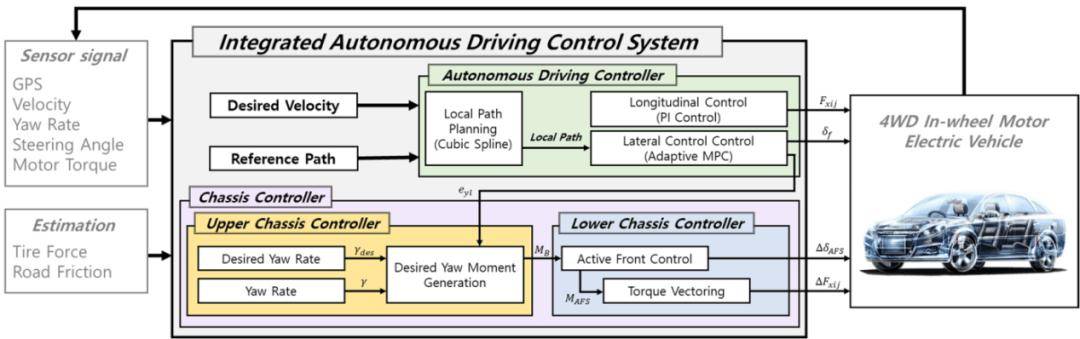
图3 AD控制器执行车辆的纵向/横向路径控制
对于纵向控制,设计了比例积分(PI)控制器来进行加速度控制。对于横向控制,在当前车辆位置规划车辆的目标路径,并利用AMPC进行转向控制以进行路径跟踪。模型中添加了 0.01 秒的时间延迟,以考虑大多数底盘控制器采用的 100 Hz 采样间隔。AMPC 逻辑工作在更慢的 20 Hz 采样间隔,以允许其繁重的计算负载,这比 PI 控制器的计算负载还要大。AD 控制器的详细信息将在以下部分中介绍。
2.1. 纵向控制器
如图3所示,表示了AD控制器由纵向控制器和横向控制器组成。由于本研究的主要重点在于设计横向控制器,因此采用相对简单的PI控制方法来设计纵向控制器。
该控制器执行加速控制,以便自动驾驶车辆能够以所需的速度Vdes行驶。为此,控制器首先使用如下方程1计算所需的加速度ades。
所需加速度的大小受到其上限aupper的限制,以防止过度加速或减速。在方程2中,ka 用作根据速度误差计算所需加速度的设计参数。较大的ka会导致较大的所需加速度值,反之亦然。ka需要仔细调整,因为它会影响后续TV逻辑的性能。大的ka加强了速度跟踪,但同时减少了车辆稳定性的维持。
本研究中ka设置为 10。一旦计算出所需的加速度,PI 控制器就会执行加速度控制。由于该PI控制器结构简单,本文省略其细节。
2.2. 横向控制器
AD控制器的横向控制功能采用AMPC实现。本研究中采用 AMPC 的方法可以通过将其与自动驾驶车辆横向控制逻辑中广泛使用的纯追踪方法进行比较来解释。AMPC 和纯追踪的相似之处在于,两种方法都计算转向角度,以便车辆沿着前方的目标路径行驶,但纯追踪将前方的单个航路点设置为要通过的目标点,而 AMPC 会考虑一定时间范围内的多个航路点。这样提高了车辆的横向稳定性,同时实现了良好的路径跟踪性能。AMPC 还允许考虑控制过程的反馈影响,而纯粹的路径追踪则不允许。最后,只有 AMPC 在考虑转向控制的情况下在一定时间范围后提供横向位置误差。该误差数据允许计算出良好的期望横摆力矩,以进一步提高车辆横向稳定性和路径跟踪性能。
AMPC 的工作原理是使用两个有限时间范围(预测范围和控制范围)来预测系统的未来行为。预测范围是预测状态变量的采样周期的倍数,控制范围是通过解决优化问题来计算控制变量的时间间隔。直到最近,MPC 还很少用于车辆控制领域,因为大多数车辆控制器使用只能检测当前正在发生情况的车载传感器,但 MPC 开始引起人们的关注,因为当今许多车辆都配备了环境传感器,这些传感器可以检测当前发生的情况,可以很快揭示车辆会发生什么。
在 AMPC 中选择更广阔的视野可以使控制器对未来看得更远,从而为即将到来的危险做好准备。然而,更宽的视野可能会导致 ECU 的计算负担,因为预测是通过解决视野间隔的每个样本优化问题来完成的。鉴于此,预测层通常选择在20到30之间,控制层选择为预测层的1/4到1/3。
在本文中,预测范围设置为 20,控制范围设置为 6。下面描述将原始系统方程转换为与 AMPC 相关的形式的过程。其中x代表状态,u代表控制。
为了实现AMPC所需的优化过程,可以将上述系统转化为离散状态空间中的递归形式。A和B转换为其离散时间形式,其中T代表采样时间。
下图 4 说明了如何计算目标路径。

图 4. 车辆的目标路径和预测路径
其中,x(k+m|k)是当前步骤后 m 个样本的状态估计,由 AMPC 根据当前状态计算得出。图中,xref(k+m|k)表示m个样本后车辆的目标路径。式(8b)中的状态向量的四个元素中,第三个元素、第四个元素、横向位置和偏航角分别表示车辆的路径。
底盘控制器
本节介绍底盘控制器的详细信息。如图3所示,本研究的机箱控制器由两层组成:上机箱控制器和下机箱控制器。其中,上底盘控制器根据横摆率误差和横向位置误差计算所需的横摆力矩。下底盘控制器通过AFS和TV的集成控制实现所需的横摆力矩。
3.1. 底盘控制器
传统的底盘控制器通过将横摆角速度调节至所需值来保持车辆横向稳定性。然而,对于自动驾驶车辆来说,还必须考虑车辆的横向位置,因为底盘控制器必须代替人类驾驶员进行横向操纵。
如上图 4 所示,MPC 转向控制可以预测未来的横向位置误差。
基于此,本文设计的底盘控制器旨在减少当前时刻的横摆角速度误差和未来某个时刻样本的横向位置误差。底盘控制器由上层控制器和下层控制器组成,如图3所示,本节介绍上层控制器。侧滑角和横摆角速度都广泛用于提高车辆的横向稳定性。然而,无法直接测量真实车辆的侧滑角,也很难以足够的精度估计该参数。
考虑到这个问题,仅利用横摆角速度来设计底盘控制器。通过将横摆率调节至所需值可以保持车辆横向稳定性。对于期望的横摆角速度,本文还采用了在许多 ESC 算法中广泛使用的δf和Vx当前值下的稳态横摆角速度。
在本文中,当从如上等式中公式升级期望横摆角速度时,还考虑了另外两个方面。首先,考虑了由于道路摩擦极限而导致的横摆率上限。其次,寻求更平滑的曲线来获得所需的横摆角速度,以避免要求控制器进行过于突然的改变。如下等式是考虑到这些因素后的最终期望偏航率。
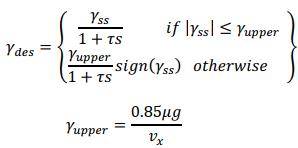
上式中,g为重力加速度,μ为路面摩擦系数。参数τ是一个选择的时间常数,用于为γdes提供平滑的时间曲线。第二个方程还提供了第一个方程中稳态偏航率γss的上限,添加此值是为了考虑第一方程中不包括的道路摩擦效应。当在低摩擦路面上仅使用公式控制所需横摆角速度时,车辆的稳定性可能会降低。添加常数 0.85 是为了补偿在推导偏航率限制时忽略横向加速度的影响。
本文中的上底盘控制器采用滑模控制(SMC),从先前 AMPC 控制器的输出中找到所需的横摆力矩:横向位置误差和横摆率误差。之所以采用 SMC,是因为 SMC 可以在计算所需横摆力矩时考虑非线性系统特性(在本例中为非线性轮胎特性)。如下式中,s为由偏航率误差和横向位置误差组成的滑动面,以λ作为权重来确定两个误差的相对重要性。
在上述方程中,eyl是当前步骤后kp样本的横向位置误差,由AD控制器中的AMPC算法计算得出。
通过使用滑动表面的横向位置误差的预测值,上底盘控制器可以将车辆稳定地移回到期望的路径。这类似于许多自动驾驶车辆横向控制中采用的预测控制策略。
为了使上式中的函数成为Lyapunov 函数,必须满足滑模存在的充分条件(
);当偏航力矩满足以下方程时,对应的力矩计算参照如下方程进行:
3.2. 下部底盘控制器 — 主动前转向AFS 和 扭矩矢量TV
一旦上底盘控制器计算出所需的偏航力矩MB,下底盘控制器就会使用AFS和TV的集成控制来实现它。在这项研究中,主动前轮转向AFS 优先于扭矩矢量TV方式,以提高驾驶舒适度并降低能耗。
3.2.1 AFS控制
本节介绍如何使用 AFS 计算前转向角ΔδAFS,以实现来自上部底盘控制器的所需横摆力矩 MB。当附加前转向角 ΔδAFS较小时,可以假设方程中的Δαf = Δδf,因为方程中的其他剩余项要小得多。根据这一假设,由ΔδAFS引起的横向轮胎力和随后的横摆力矩可以通过如下方程求出。
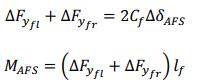
从上式可以看出,为了从上底盘控制器获得所需的横摆力矩MB,前转向角ΔδAFS可以通过如上公式计算出来。
如上方程中需要将ΔδAFS限制在+-0.4 度之内。最终的前转向角是来自 AD 控制器的δf和来自 AFS 底盘控制器的ΔδAFS之和。方程中的约束可防止ΔδAFS变得太大并削弱 AD 控制器的路径跟踪能力。
3.2.2. 扭矩矢量控制
由四个 IWM 驱动的电动汽车可以实现四个车轮纵向力的任意组合;甚至某些车轮的牵引力和其他车轮的制动的组合也是可能的,且这种灵活性使系统能够同时考虑不同的性能方面。
在本设计中,扭矩控制TV 逻辑被设计为仅当 AFS 的转向力不足以产生上部底盘控制器的命令偏航力矩时才发挥作用。与 AFS 生成的前转向横摆力矩不同,TV 控制器在四个车轮处生成具有不同纵向力的横摆力矩。TV的控制变量可以定义如下。
如下方程显示了TV提供的偏航力矩的大小。
基于如上分析,将AFS和TV两种控制模式结合可以很好的实现有效的智驾系统车辆执行控制。
总结
前文介绍了一种针对具有四个独立 IWM 的自动驾驶车辆的集成 AD 控制系统。AD控制器是利用PI控制和AMPC实现纵向/横向路径跟踪控制。底盘控制器由两个横向控制单元组成:AFS控制和TV控制。他们共同使用滑模控制找到了维持车辆稳定性的横摆力矩,其中 AFS 优先于 TV,以提高安全裕度并节省能源。假设车辆在每个车轮上独立采用 IWM,AD控制器使用比例积分(PI)控制和自适应模型预测控制来实现纵向/横向路径跟踪。底盘控制器由两个横向控制单元组成:主动前轮转向(AFS)控制和扭矩矢量(TV)控制。他们共同找到了使用滑模控制来维持车辆稳定性的横摆力矩。AFS 优先于 TV,以提高安全裕度和节能。然后,通过解决约束最小二乘问题,将命令横摆力矩最优地分配到每个车轮。
该系统由AD控制器和底盘控制器组成,它们在功能上集成在一起,可以提高车辆稳定性和路径跟踪性能。
声明: 本文由入驻搜狐公众平台的作者撰写,除搜狐官方账号外,观点仅代表作者本人,不代表搜狐立场。
回首页看更多汽车资讯
大白兔
0大白兔 小子
0