

自动驾驶域控研究:One board/One Chip方案将对汽车供应链产生深远影响
佐思汽研发布了《 2024-2025年自动驾驶域控制器和中央计算机(CCU)行业研究报告》。
自动驾驶域控发展的三个阶段:Multi board、One board、One Chip
佐思汽研数据显示,2024年1-9月,国内市场(不含进出口)乘用车前装标配智驾域控制器已达到225.4万套。2023年以来,自动驾驶域控渗透率逐月大幅上升,2024年9月自动驾驶域控渗透率已达到17.4%,而去年同期仅为8.61%。
2023-2024年9月国内乘用车自动驾驶域控制器渗透率
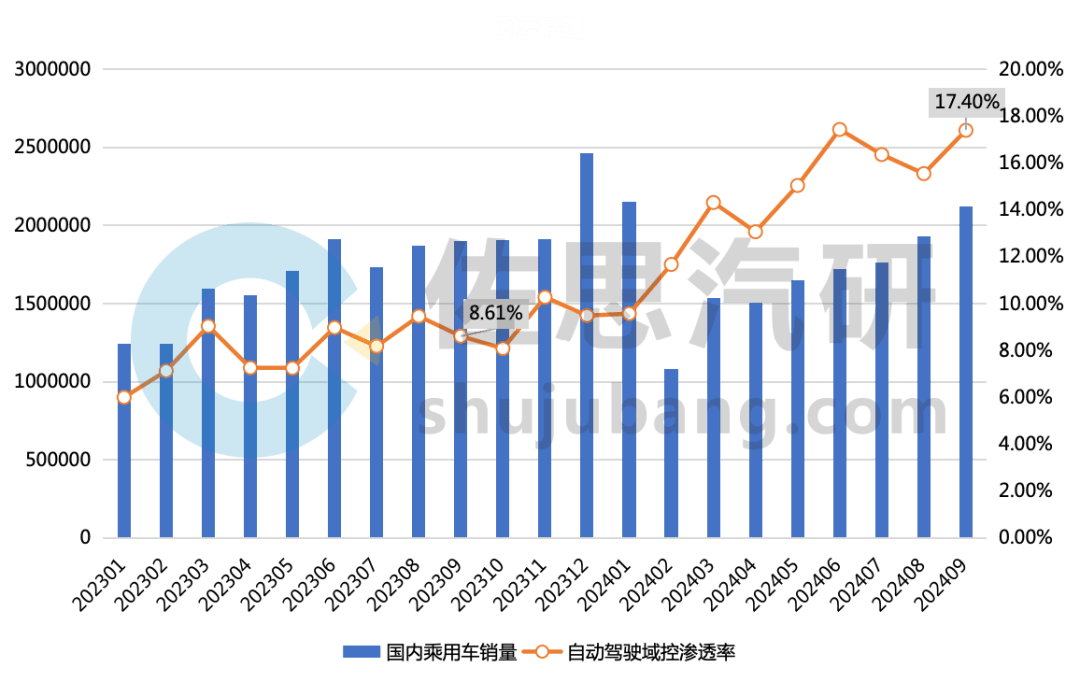
来源:佐思汽研数据库
各大主机厂的自动驾驶域控开发和应用已经基本普及,下一阶段主要是向中央计算机(CCU)发展演进。在本报告中,我们将自动驾驶域控制器的发展分为三个阶段:
Part.01
Multi/one Box,multi board,multi Chips(多/单盒,多板,多芯)
采用多盒,每个域控制器单独一块电路板,各个域之间通过Ethernet传输数据,这是现阶段普遍采用的域集中式E/E架构,优势在于技术成熟,成本可控,劣势在于Ethernet传输速率有限,目前多为100-1000Mb/s级别。
Part.02
One Box,one board,multi Chips(单盒,单板,多芯)
车内不同域之间不再需要编码解码,省去了编码和解码的芯片、电源、散热、线束,降低了成本,芯片通过PCIe接口传输数据,目前PCIe Gen 4广泛应用于汽车系统,Gen 4 具有 16 GT/s,每通道速率为 1.97 Gb/s,通过多通道聚合,传输速率远远高于Ethernet,一般可达到10Gb/s+。
这一阶段,多将车身域、网关等功能做集成,搭载以NXP S32G、芯驰 G9H 、瑞萨 RH850等中央网关芯片。
Part.03
One Box,one Chip(单盒,单芯)
整个域控制器 SoC 有多个 IP core(IP内核),IP核之间采用片间通信互联,未来的众多高性能电动汽车将搭载英伟达采用Blackwell架构的新一代自动驾驶汽车(AV)处理器DRIVE Thor,NVIDIA Blackwell 架构搭载专为Transformer、大语言模型(LLM)和生成式AI工作负载而打造,英伟达为下一代Thor配套了NVLink 5互联技术。芯片内存带宽可以达到100 Gb/s以上。
总结来看,第一阶段 multi board 方案已基本实现;领先的新势力车厂,如蔚来、小鹏等已进入第二阶段,实现量产交付 One board 方案,部分车厂可能选择直接过渡到第三大阶段 —— One Chip 方案,预计2025年将成为 One Chip 方案规模量产元年。在这一过程中,一般来说,底盘域、动力域不会随 One Chip 集成,主要是由于供应商解决方案较为封闭,向主机厂开放权限的可能性不大。
AI大模型作为主机厂竞争的焦点,One Chip 方案具备高带宽能力,能够让所有软件共享数据和算力,支持实现诸如端到端大模型、语言大模型等。
此外,One Chip 方案下,IP core(IP内核)自由组合成为可能,基于Chiplet架构设计的芯片将成为未来十年车载芯片发展的重要方向之一。
自动驾驶域控随E/E架构不断演进

来源:佐思汽研《2024-2025年自动驾驶域控制器和中央计算机(CCU)行业研究报告》
自动驾驶域控开发策略——行业正快速部署 One board 、One chip 方案
进入2024年,迫于进一步降本的压力,行业正快速部署 One board 、One chip 智驾域控方案。
Tier1供应商自动驾驶和中央计算机(CCU)域控解决方案

来源:佐思汽研《2024-2025年自动驾驶域控制器和中央计算机(CCU)行业研究报告》
亿咖通 “One board” 和 “One chip” 产品布局
“ One board”:亿咖通科技在“One Board”的方案设计上,主要围绕“可量产落地”的国芯策略,硬件方面采用了“单板双芯”的架构设计,芯片采用的是国内成熟的7nm车规级(龍鹰一号)、智驾SoC(华山A1000),两颗主控SoC通过PCIe实现高速互联;软件的部分,通过高度标准化、模块化的“云山”跨域软件平台,实现各个功能域的互联互通,从而实现第二阶段 “单板多芯(One Board)” 域控/中央计算平台量产落地。
其中,搭载两颗黑芝麻智能“华山A1000”芯片的亿咖通·天穹Pro 智能驾驶计算平台以及两颗“龍鹰一号”的亿咖通·安托拉®1000 Pro计算平台已在领克08 EM-P以及领克07 EM-P车型上实现大规模量产交付。
“ One Chip”:亿咖通科技目前基于国内首款7nm车规级SoC “龍鹰一号”(8 TOPS)打造了两款“舱泊一体”One Chip产品,分别为「亿咖通•安托拉®1000计算平台AI加强版」以及「亿咖通•汽车大脑® 安托拉1000Plus计算平台」,两款产品分别搭载于吉利银河E5、领克Z20车型上大规模量产,银河E5智能化口碑与市场表现俱佳,量产层面取得了良好的市场反馈。
而集成度更高的“舱行泊”一体版本,可支持包括L2 ADAS、自动泊车、主流座舱功能在内的舱行泊一体功能开发,具备极高性价比,预计于2025年上车。据悉,未来亿咖通科技可能会基于升级后的“龍鹰一号Pro”(56 TOPS)开发舱行泊一体方案,支持更高阶的舱行泊一体功能。
亿咖通自动驾驶域控和中央计算机(CCU)产品矩阵

来源:佐思汽研《2024-2025年自动驾驶域控制器和中央计算机(CCU)行业研究报告》
德赛西威 ”One Chip" 产品布局——IPU14 & ICPS01E
-
IPU14:2024年10月,德赛西威下一代高性能智能驾驶域控制器IPU14首次公开展示,搭载了英伟达最强智驾芯片Thor-U,支持单芯片驾舱控一体,并支持L3级有条件自动驾驶,还具备部分场景L4级自动驾驶的能力;
-
ICPS01E:2024年10月,德赛西威与奇瑞携手开发的“8775舱驾一体中央计算平台” 公开展出,在本次联合开发过程中,奇瑞提供了整车资源,德赛西威承担具体产品开发任务。
德赛西威自动驾驶域控和中央计算机(CCU)产品矩阵

来源:佐思汽研《2024-2025年自动驾驶域控制器和中央计算机(CCU)行业研究报告》
零束科技 “One board” 产品——零束中央大脑二代ZXD2
-
2024年9月,基于地平线征程®6系列+高通最新座舱SoC打造的零束中央大脑二代ZXD2(Z-ONE X Device)首样顺利点亮;
-
ZXD2实现了智能驾驶、智能座舱、智能计算等系统的跨域融合;
-
ZXD2采用One Box软硬一体化设计,计算平台重量减少40%,体积减少30%,算力存储效率提升30%,数据通信带宽提升30倍,整车OTA升级时间缩短至30分钟以内。

来源:零束科技
主机厂层面,部分厂商已陆续实现了 “单板多芯(One Board)” 域控计算平台量产落地,包括小鹏汽车、蔚来汽车等。
小鹏汽车 “One board” 产品——驾舱融合计算中心XCCP
-
实现了C-DCU、XPU二合一,实现智能驾驶、座舱、仪表、网关、IMU、功放等功能集成,相比上一代中央计算架构,XCCP实现了40%成本节约,性能提升50%;
-
小鹏X9实现了驾舱融合,同一块电路板上,两块芯片的通信是PCIe,速度能达到10个Gb/s级别;
蔚来汽车 “One board” 产品——中央计算平台ADAM
-
舱驾融合方案,1颗高通骁龙8295智能座舱芯片+4颗英伟达Orin X智能驾驶芯片。新的中央计算平台集成器件数量12,000+,攻克了高集成度带来的PI/SI,EMC,Thermal等技术难题,相较于分离式舱驾域控制器体积减少40%,重量减轻20%;
-
中央计算平台ADAM可以让车内不同域之间不再需要编码解码,省去了编码和解码的芯片、电源、散热、线束等,通过电路板上的蚀刻电路直接取代千兆以太网,智驾和座舱之间跨域数据带宽从千兆大幅提升至16Gbps,实现10倍以上的传输速率提升;
-
跨域算力共享,调用智驾、智舱和整车控制最大256TOPS算力;同时,跨域算力共享还可以更合理分配各个大算力需求,而非完全限制在各自的智驾、智舱领域。

来源:蔚来汽车
One Chip方案将对汽车域控、芯片供应链产生深远影响
One Chip方案或将是 “舱驾控一体” 的终极形态,其优势体现在:
-
系统成本更优:单SoC芯片方案集成度更高,实现物料共享,BOM成本降低
-
系统响应更快:相对于板间的Switch通讯或芯片间PCIe通信,片内通信延迟更短,带宽更大,系统响应更快
-
软件共享数据和算力:统一的整车级操作系统,支持实现诸如端到端大模型、语言大模型等
One Chip方案下,代表性的多域融合SoC包括英伟达Drive Thor,高通Snapdragon Ride Flex平台的首款芯片SA8775以及下一代SA8795,黑芝麻智能“武当”C1200系列芯片,以及最新推出的瑞萨R-Car X5系列等。
2024年11月,瑞萨在业内率先推出采用车规3nm制程的多域融合SoC——R-Car X5系列,单个芯片可同时支持多个汽车功能域,包括高级驾驶辅助系统(ADAS)、车载信息娱乐系统(IVI)以及网关应用在内的多个车载应用。该SoC还提供通过Chiplet(小芯片封装)技术扩展人工智能(AI)和图形处理性能的选项。R-Car X5系列计划于2027年量产。
R-Car X5系列的关键性能包括:
-
3nm工艺,采用台积电最先进的工艺节点制造,同等性能下,功耗比5nm工艺节点设计的产品降低30-35%
-
400TOPS AI算力,支持通过Chiplet扩展,可以将AI处理性能提升3-4倍甚至更多
-
1,000K DMIPS CPU算力,搭载总计32个Arm® Cortex®-A720AE CPU内核
-
配备6个Arm Cortex-R52双锁步CPU内核,实现超过60K DMIPS的性能,无需外部微控制器(MCU)即可支持ASIL D功能
-
支持高达4TFLOPS的GPU处理能力
-
采用Chiplet技术,提供标准的UCle(通用小芯片互联通道)芯片间互联接口及API
-
支持虚拟ECU开发,可使用瑞萨RoX SDV平台,缩短汽车行业的上市时间
瑞萨R-CAR SoC产品线

来源:瑞萨电子
可以预见,One Chip 方案将对汽车域控制器硬件、整车操作系统、车规SoC设计和制造等产业链带来深远影响。主机厂、Tier1和芯片厂商,将围绕多域融合、chiplet芯粒、片间互联(如PCIe、NVLink等)等新技术领域展开激烈竞争。
《2024-2025年自动驾驶域控制器和中央计算机(CCU)行业研究报告》目录
页数:500页
01
自动驾驶域控和中央计算机定义和市场分析
1.1 自动驾驶域控和中央计算机定义
汽车E/E架构的五个维度
E/E架构部署现状,及未来五年趋势预测
E/E演进趋势下,自动驾驶域控向车载计算平台演进
E/E演进趋势下,自动驾驶域控发展的三个阶段:Multi board、One broad、One Chip(1)
E/E演进趋势下,自动驾驶域控发展的三个阶段:Multi board、One broad、One Chip(2)
自动驾驶域控——典型的Multi board方案
自动驾驶域控——典型的One broad方案(1)
自动驾驶域控——典型的One broad方案(2)
自动驾驶域控——典型的One chip方案(1)
自动驾驶域控——典型的One chip方案(2)
1.2 中国乘用车自动驾驶系统市场规模和渗透率预测
中国本土乘用车自动驾驶系统装配量(L2/L2,L2.5,L2.9,L3/L4)
附数据表:中国本土乘用车销量预测,2024-2030 E
附数据表:中国本土乘用车自动驾驶系统市场规模预测,2024-2030 E
1.3 中国乘用车自动驾驶域控制器市场规模和渗透率预测
中国本土乘用车自动驾驶域控渗透率:2023-2024年,按月度
中国乘用车自动驾驶域控制器出货量预测(万台),2023-2030E
3.1.5 中国乘用车自动驾驶域控制器市场规模预测(亿元),2023-2030E
附数据表:中国乘用车自动驾驶域控制器出货和市场规模预测,2024-2030E
中国乘用车自动驾驶域控制器供应商配套量推算,2023年
1.4 中国乘用车分价位段自动驾驶域控及主控SoC芯片厂商份额
中国乘用车自动驾驶域控以及主控SOC芯片厂商份额(0-10万级别)
中国乘用车自动驾驶硬件以及主控SOC芯片厂商份额(10-15万级别)
中国乘用车自动驾驶硬件以及主控SOC芯片厂商份额(15-20万级别)
中国乘用车自动驾驶硬件以及主控SOC芯片厂商份额(20-25万级别)
中国乘用车自动驾驶硬件以及主控SOC芯片厂商份额(25-30万级别)
中国乘用车自动驾驶硬件以及主控SOC芯片厂商份额(30-35万级别)
中国乘用车自动驾驶硬件以及主控SOC芯片厂商份额(35-40万级别)
中国乘用车自动驾驶硬件以及主控SOC芯片厂商份额(40-50万级别)
中国乘用车自动驾驶硬件以及主控SOC芯片厂商份额(50万以上)
1.5 中国乘用车自动驾驶域控制器成本分析
主要自动驾驶域控和SoC芯片成本分析(1)
.....................
主要自动驾驶域控和SoC芯片成本分析(5)
主要自动驾驶域控和SoC芯片成本分析(6)
02
Tier1和OEM的自动驾驶域控和中央计算机产品总结
2.1 中国乘用车超大算力自动驾驶域控产品对比
1000T以上超大算力智驾域控制器对比
2.2 中国乘用车大算力自动驾驶域控产品对比
150-300T大算力智驾域控制器对比(1)
150-300T大算力智驾域控制器对比(2)
150-300T大算力智驾域控制器对比(3)
300-1000T大算力智驾域控制器对比
2.3 中国乘用车中算力自动驾驶域控产品对比
100-150T中算力智驾域控制器对比(1)
100-150T中算力智驾域控制器对比(2)
100-150T中算力智驾域控制器对比(3)
50-100T中算力智驾域控制器对比
2.4 中国乘用车中低算力自动驾驶域控产品对比
10-50T低算力智驾域控制器对比(1)
.....................
10-50T低算力智驾域控制器对比(5)
2.5 中国乘用车低算力自动驾驶域控产品对比
10T以下低算力智驾域控制器对比(1)
10T以下低算力智驾域控制器对比(2)
10T以下低算力智驾域控制器对比(3)
2.6 Tier1自动驾驶域控和系统解决方案总结
30家Tier1自动驾驶域控产品线汇总(1)
30家Tier1自动驾驶域控产品线汇总(2)
30家Tier1自动驾驶域控产品线汇总(3)
.....................
30家Tier1自动驾驶域控产品线汇总(11)
30家Tier1自动驾驶域控产品线汇总(12)
30家Tier1自动驾驶域控产品线汇总(13)
2.7 主机厂自动驾驶域控和系统解决方案
20家主机厂自动驾驶域控和系统方案配置(含在研项目)(1)
.....................
20家主机厂自动驾驶域控和系统方案配置(含在研项目)(7)
20家主机厂自动驾驶域控和系统方案配置(含在研项目)(8)
03
外资芯片平台的自动驾驶域控方案
3.1 英伟达Thor平台
英伟达DRIVE Thor SoC芯片智驾域控解决方案
英伟达DRIVE Thor+S32G+TC397架构方案
3.2 英伟达ORIN-X/Y/N平台
英伟达Orin-X/N SoC芯片智驾域控解决方案(1)
.....................
英伟达Orin-X/N SoC芯片智驾域控解决方案(5)
小鹏汽车双ORIN-X自动驾驶域控板拆解(1)
小鹏汽车双ORIN-X自动驾驶域控板拆解(2)
比亚迪双ORIN-X自动驾驶域控
创时智驾单ORIN-X开发板框图
智驾、座舱、泊车三合一双Orin跨域融合系统方案(1)
智驾、座舱、泊车三合一双Orin跨域融合系统方案(2)
智驾、座舱、泊车三合一双Orin跨域融合系统方案(3)
智驾、座舱、泊车三合一双Orin跨域融合系统方案(4)
Orin-X/J5+8295+S32G 跨域融合系统方案
Orin-X+8295+2*TC397 跨域融合系统方案
3.3 英伟达Xavier平台
英伟达Xavier SoC芯片智驾域控解决方案
英伟达Xavier SoC芯片智驾域控解决方案
单Nvidia Xavier SoC自动驾驶域控方案
3.4 高通Snapdragon Ride/Flex平台
高通Ride/Flex SoC芯片智驾域控解决方案(1)
高通Ride/Flex SoC芯片智驾域控解决方案(2)
.................
高通Ride/Flex SoC芯片智驾域控解决方案(8)
畅行智驾SA8650智驾域控框架图
畅行智驾“舱驾融合”域控参考架构
畅行智驾SA8620智驾域控产品
双8650高算力域控方案框图( 2*SA8650+S32G274 )
单8620+TC377中算力域控方案框图
诚迈科技基于高通8775的舱驾软件架构
均联智行行泊一体智驾域控制器nDriveH硬件主板
岚图汽车中央集中式域控制器OIB-GEN1关键参数
零跑汽车中央超算C-DCU硬件主板
智联科技舱泊一体域控方案
3.5 Mobileye EyeQ6平台
Mobileye EyeQ6 SoC芯片智驾域控解决方案
Mobileye EyeQ6H(1-2颗)轻量级行泊一体域控方案
Mobileye EyeQ™6 Lite(EyeQ6L)
Mobileye EyeQ™6 Lite(EyeQ6L)入门级L2/L2+前视一体方案
3.6 Mobileye EyeQ5平台
Mobileye EyeQ5 SoC芯片智驾域控解决方案
Mobileye EyeQ5 SoC芯片智驾域控解决方案
3.7 TI TDA4平台
TI TDA4 SoC芯片智驾域控解决方案(1)
TI TDA4 SoC芯片智驾域控解决方案(2)
TI TDA4 SoC芯片智驾域控解决方案(3)
TI TDA4 SoC芯片智驾域控解决方案(4)
单TDA4VM行泊一体域控方案
双TDA4VM行泊一体域控方案
TDA4VH行泊一体域控方案(1)
TDA4VH行泊一体域控方案(2)
TI TDA4VM系统架构和关键参数
TI TDA4VH-Q1系统架构和关键参数
TI TDA4VEN-Q1系统架构和关键参数
3.8 瑞萨R-Car平台
瑞萨多域融合SoC——R-Car X5
单瑞萨R-Car V4H自动驾驶域控方案
3.9 安霸CV平台
安霸CV2/CV3 SoC芯片智驾域控解决方案
04
国产芯片平台的自动驾驶域控方案
4.1 地平线J6平台
地平线J6 SoC芯片智驾域控解决方案
4.2 地平线J5平台
地平线J5 SoC芯片智驾域控解决方案(1)
地平线J5 SoC芯片智驾域控解决方案(2)
地平线J5 SoC芯片智驾域控解决方案(3)
地平线J5 SoC芯片智驾域控解决方案(4)
地平线J5 SoC芯片智驾域控解决方案(5)
地平线J5 SoC芯片智驾域控解决方案(6)
单J5 + TDA4/S32G/ TC397/芯驰E3,行泊一体域控
单J5+芯驰X9,11V5R方案,行泊一体域控
单J5,6V1R ,行泊一体域控
单J5,11V5R1L ,行泊一体域控
双J5+MCU,行泊一体域控
多J5+多TDA4+多MCU,行泊一体域控
智联科技高阶行泊一体域控制器
智联科技舱行泊一体域控制器
4.3 地平线J3平台
地平线J3 SoC芯片智驾域控解决方案
地平线J3,前视一体方案
单J3+MCU(TC397),行泊一体域控
3颗地平线J3+S32G,行泊一体域控
双J3+TDA4VM ,行泊一体域控
J3+TDA4VM ,行泊一体域控
智联科技行泊一体域控制器
智联科技舱泊一体域控方案:地平线J3+MCU
4.4 地平线J2平台
地平线J2 SoC芯片智驾域控解决方案
4.5 芯驰科技V9/X9平台
芯驰科技X9系列SoC芯片智驾域控解决方案
芯驰科技V9P,L2+单芯片行泊一体域控方案
芯驰科技V9系列域控
4.6 黑芝麻智能A1000平台
黑芝麻智能A1000 SoC芯片智驾域控解决方案
单黑芝麻智能A1000,行泊一体域控
双黑芝麻智能A1000,行泊一体域控
黑芝麻智能A1000合作域控
黑芝麻智能A1000合作车型
4.7 黑芝麻智能C1000平台
黑芝麻智能武当C1000系列SoC芯片智驾域控解决方案
黑芝麻“武当”系列C1200智能汽车跨域计算芯片平台
4.8 华为昇腾平台
华为昇腾系列SoC芯片智驾域控解决方案
华为智能驾驶控制器的芯片方案(MDC610)
华为智驾域控制器MDC610系统结构
华为智驾域控制器MDC610硬件主板
05
国产自动驾驶域控制器厂商研究
5.1 亿咖通
亿咖通自动驾驶域控和中央计算机(CCU)产品线
亿咖通天穹Pro:行泊一体智能驾驶计算平台
亿咖通汽车大脑安托拉系列计算平台,舱行泊方案
亿咖通Antora 1000 Pro舱行泊方案:两颗龍鹰一号
亿咖通Antora 1000舱行泊方案:单颗龍鹰一号
亿咖通汽车大脑(ECARX Super Brain)中央计算平台
亿咖通芯片和域控制器路线演进
5.2 德赛西威
德赛西威自动驾驶域控和中央计算机(CCU)产品线
德赛西威 IPU14:与昊铂、NVIDIA合作基于Thor L4级功能的中央计算平台
德赛西威 IPU04P:硬件技术参数
德赛西威 IPU04 :硬件技术参数
德赛西威 IPU04 :软件架构
德赛西威 IPU03:硬件技术参数
德赛西威 IPU 02/03/04产品性能对比
德赛西威 IPU 02/03/04产品功能对比
德赛西威8775舱驾一体中央计算平台
德赛西威ICP Aurora:车载智能中央计算平台
德赛西威与重庆长线智能合作
5.3 华为
华为CC架构
华为自动驾驶域控产品线
华为MDC610 PRO:硬件主板拆解
华为MDC610 PRO:硬件BOM成本拆解
华为MDC610 PRO:尺寸设计
华为MDC610:系统框图和产品参数
华为MDC610:硬件主板拆解
华为MDC自动驾驶计算平台:技术特点
华为MDC自动驾驶计算平台:软硬件架构
华为MDC自动驾驶计算平台:平台框架
华为MDC自动驾驶计算平台:硬件平台
华为MDC自动驾驶计算平台:软件架构
华为MDC自动驾驶计算平台:软件与工具链(1)
华为MDC自动驾驶计算平台:软件与工具链(2)
华为MDC自动驾驶计算平台:软件与工具链(3)
华为MDC自动驾驶计算平台:软件与工具链(4)
华为MDC自动驾驶计算平台:车规级安全设计
华为MDC自动驾驶计算平台:ISO26262和ASPICE认证
华为MDC自动驾驶计算平台:客户和合作伙伴
5.4 大疆车载(卓驭)
大疆车载自动驾驶域控产品线
大疆车载成行平台的高阶智驾方案
5.5 东软睿驰
东软睿驰产品线
东软睿驰2024年自动驾驶控制器新品
东软睿驰自动驾驶域控和中央计算机(CCU)产品线
东软睿驰X-Box 5.0:搭载J6E/J6M
东软睿驰X-Box 5.0:智驾应用套件
东软睿驰X-Box 5.0:内置两段式端到端的架构
东软睿驰X-Box 4.0:搭载地平线J5 or 芯驰科技X9U
东软睿驰X-Box 3.0
东软睿驰中央计算单元X-Center 2.0
5.6 福瑞泰克
福瑞泰克财务数据2021-2024H1
福瑞泰克智驾解决方案: FT Pro、FT Max、FT Ultra
福瑞泰克智驾客户群
福瑞泰克ODIN智驾数智底座:ODIN 1.0和ODIN 2.0
福瑞泰克自动驾驶产品roadmap
福瑞泰克自动驾驶域控和中央计算机(CCU)产品线
福瑞泰克ADC30:面向L3级高阶自动驾驶方案
福瑞泰克ADC25:面向增强型行泊一体方案
福瑞泰克ADC20:高性价比5V5R行泊一体解决方案
福瑞泰克FVC3:第三代前视一体摄像头
福瑞泰克FVC2:第二代前视一体摄像头
5.7 知行科技
知行科技自动驾驶域控产品线
知行科技满足市场不同需求解决方案
知行科技IDC系列行泊一体域控产品规划
知行科技IFC系列前视一体机产品规划
知行科技IDC MID和IDC HIGH:行泊一体域控
知行科技IDC MID:行泊一体域控
知行科技IDC MID:硬件配置和功能亮点
5.8 联想车计算
联想车计算发力车载域控制器平台
联想车计算自动驾驶域控和中央计算机(CCU)产品线
联想车计算面向L4级别自动驾驶域控制器及解决方案AD1
联想车计算智驾平台大模型中间件 Ultra Boost:架构图
联想车计算智驾平台大模型中间件 Ultra Boost:功能分层
5.9 零束科技
零束科技自动驾驶域控和中央计算机(CCU)产品线
零束科技智驾计算平台
零束科技智驾域控制器产品ZPD
零束科技中央大脑ZXD1(智舱、智算融合)
零束科技中央大脑ZXD2(智舱、智驾、智算、智联融合)
零束科技域控操作系统
5.10 创时智驾
创时智驾自动驾驶域控产品线
创时智驾自动驾驶域控制器:产品矩阵
创时智驾iECU 3.1 :基于ORIN-X的行泊一体控制器
创时智驾iECU 1.5:基于TI TDA4VM 的行泊一体域控制器
创时智驾自主基础软件平台
5.11 宏景智驾
宏景智驾自动驾驶域控产品线
宏景智驾行泊一体域控制器
宏景智驾ORIN高阶智驾域控制器
宏景智驾IPM智能摄像头模组和APA/IDDC域控制器
宏景智驾舱泊一体域控:基于芯擎科技SE1000
5.12 魔视智能
魔视智能自动驾驶域控产品线
魔视智能Magic Pilot:单SoC行泊一体域控制器
魔视智能Magic Pilot:关键技术特点
魔视智能CYCLOPS:行泊一体多模态前融合BEV感知方案
5.13 MINIEYE
MINIEYE自动驾驶域控产品线
MINIEYE iPilot,基于地平线征程系列芯片开发
MINIEYE 典型的自动驾驶方案
5.14 MAXIEYE
MAXIEYE MAXIPILOT自动驾驶产品矩阵
MAXIEYE自动驾驶域控产品线
MAXIEYE MAXIPILOT®2.0:从单V到多V的全平台解决方案
MAXIEYE MAXIPILOT®2.0 Lite包含两种形态
MAXIEYE MAXIPILOT®2.0 Pro解析
MAXIEYE 牧童MonoToGo™,前视一体机
5.15 纵目科技
纵目科技财务数据
纵目科技自动驾驶域控产品线
纵目科技泊车控制器
纵目科技行泊一体域控
纵目科技舱驾一体解决方案
5.16 百度Apollo
百度Apollo自动驾驶域控产品线
百度Apollo Robo-Cabin:软芯融合的舱驾泊智算平台
百度Apollo全新“驾舱图”:Apollo City Driving Max软硬件产品方案
百度Apollo全新“驾舱图”:Apollo Highway Driving Pro
百度Apollo全新“驾舱图”:Apollo Highway Driving Pro软硬件产品方案
百度Apollo全新“驾舱图”:Apollo Parking
百度Apollo全新“驾舱图”:Apollo Parking软硬件产品方案
百度Apollo全新“驾舱图”:Apollo Robo-Cabin
百度Apollo全新“驾舱图”:Apollo Robo-Cabin软硬件产品方案
5.17 均联智行
均联智行自动驾驶域控产品线
均联智行nDrive系列:L2.5级的智能驾驶解决方案
均联智行nDrive系列:基于黑芝麻智能武当系列的中央计算单元
均联智行nDriveH:基于Snapdragon Ride第二代 SoC
5.18 易航智能
易航智能自动驾驶域控产品线
易航智能笃行平台——城市记忆领航方案
易航智能BEV“灵眸”:全栈自研核心技术
易航智能全栈NOA研发
易航智能城市NOA研发RoadMap
5.19 经纬恒润
经纬恒润自动驾驶域控产品线
经纬恒润ADCU Ⅱ:经纬恒润的第二代智能驾驶域控制器
经纬恒润HPC:车载高性能计算平台
经纬恒润行泊一体域控制器解决方案
经纬恒润第二代智能驾驶域控制器(ADCU)
5.20 四维图新
四维图新自动驾驶域控产品线
四维图新NI in Car:软硬一体智能化产品服务组合
四维图新舱驾一体解决方案
四维图新舱行泊一体化解决方案
5.21 金脉电子
金脉电子自动驾驶域控产品线
金脉电子舱驾一体解决方案
金脉电子驾舱一体控制器 MADC3.5
金脉电子高阶行泊一体控制器MADC 2.5:基于双J5,通过Matrix 5认证
金脉电子高阶行泊一体控制器MADC 2.5:基于双J5的域控平台硬件板
金脉电子(英恒科技)行泊一体控制器MADC 2.0 :基于3颗征程J3芯片
金脉电子(英恒科技)L3级及以上自动驾驶域控制器:系统架构
5.22 中信科智联
中信科智联自动驾驶域控产品线
中信科智联C-V2X&ADAS融合型域控制器解决方案
中信科智联C-ADU Pro
中信科智联C-ADU Plus
5.23 畅行智驾
畅行智驾自动驾驶域控产品线
畅行智驾业务策略:自动驾驶合作开发模式
畅行智驾自动驾驶产品Roadmap
畅行智驾域控产品功能及配置规划
畅行智驾基于SA8650CCCC域控制器关键参数和系统结构
畅行智驾基于SA8650AAAA域控制器RazorDCX Pantanal
畅行智驾基于SA8540P的域控制器RazorDCX Takla关键参数和硬件主板
畅行智驾自动驾驶域控中间件:RazorWareX1.0
畅行智驾自动驾驶域控中间件:RazorWareX1.0工具链
5.24 华阳集团
华阳集团自动驾驶域控产品线
华阳集团ADC02高性能行泊一体解决方案
5.25 联友智连
联友智连自动驾驶域控产品线
联友科技智能驾驶域控制器YDU产品规划
联友科技YDU2.0,行泊一体域控制器
联友智连YDU2.0 Pro,高阶行泊一体域控制器
5.26 Nullmax(纽劢科技)
Nullmax自动驾驶域控产品线
Nullmax Intelligence新一代自动驾驶技术
Nullmax 基于基于标准版Orin芯片平台(110 TOPS)
Nullmax 全栈自研自动驾驶大脑:MAX
5.27 英博超算
英博超算公司概况
英博超算全系列智能驾驶产品家族
英博超算的HPC车载中央计算机解决方案
英博超算智能驾驶域控制器:合作模式
英博超算自动驾驶域控产品线
英博软件定义ADAS一体机
英博超算L2.99多功能智能驾驶域控制器
英博超算双J3+X9H高性能多域控制器:“悟空二号”
英博超算双J3智能驾驶域控制器
英博超算“悟空三号”
5.28 天准科技
天准科技自动驾驶域控产品线
天准科技TADC-D52
5.29 毫末智行
毫末智行HP系列:行泊一体辅助驾驶系统
毫末智行HP370
毫末智行HP570
06
外资自动驾驶域控制器厂家研究
6.1 特斯拉
特斯拉HW1.0—HW4.0:域控系统参数演进
特斯拉HW4.0域控:FSD芯片典型特征分析
特斯拉HW4.0域控:FSD主芯片算力翻三倍,首发使用GDDR6
特斯拉HW4.0域控:主摄三目变双目视觉,CMOS传感器可能选用索尼IMX490
特斯拉HW3.0硬件主板
6.2 博世
博世自动驾驶域控产品线
博世舱驾一体解决方案
6.3 大陆集团
大陆集团自动驾驶域控产品线
大陆集团自动驾驶域控制器ADC615,基于地平线J5
大陆集团800W像素前视摄像头一体机,基于地平线J3
大陆集团汽车不同域高性能计算平台HPC量产时间点
大陆集团下一代汽车电子架构的软件平台:EB xelor
6.4 采埃孚
采埃孚自动驾驶域控产品线
采埃孚自动驾驶域控制器:第四代 “采睿星”ProAI
采埃孚自动驾驶域控制器:第三代“采睿星”ProAI
采埃孚自动驾驶域控制器:第三代“采睿星”ProAI结构设计
采埃孚coDrive L2+级驾驶辅助系统:基于Mobileye方案
采睿星:高性能计算平台解决方案
采埃孚基于单摄像头的L2智能驾驶系统
6.5 安波福
安波福自动驾驶域控产品线
安波福全新第六代ADAS平台
安波福基于单SoC的舱行泊一体化方案
安波福轻量级行泊一体解决方案:Vision Box
安波福轻量级行泊一体解决方案:CORE和PRO版本
安波福Ultra PAD自动驾驶域控制器
安波福5R1V0D智能前视一体机
6.6 麦格纳
麦格纳自动驾驶域控产品线
麦格纳MAX4:L4级别自动驾驶平台
麦格纳从高通手中收购Veoneer主动安全业务
Veoneer ADAS ECU产品
Veoneer ADAS/AD ECU:宙斯计算平台
Veoneer ADAS/AD ECU 功能架构
6.7 法雷奥
法雷奥自动驾驶域控产品线
法雷奥自动驾驶域控制器
07
自动驾驶域控制器代工厂商研究
7.1 域控制器EMS代工模式分析
域控制器EMS代工模式分析:起源
域控制器EMS代工模式分析:软硬分离下的分工逻辑
域控制器EMS代工模式分析:提供域控制器硬件代工及硬件强相关的底层系统开发
域控制器EMS代工模式分析:各核心参与方的利益诉求
域控制器EMS代工模式分析:代工成本拆解
域控制器EMS代工模式分析:典型合作案例
自动驾驶域控制器代工厂主流厂商分析
域控制器代工厂商的典型职责
7.2 典型的自动驾驶域控制器EMS代工厂商
富士康为英伟达DRIVE Orin的电子控制单元(ECU)代工
广达电脑车汽车电子代工业务合作伙伴
和硕汽车电子代工业务合作伙伴
纬创-蔚隆昆山厂与蔚来合作情况
伟创力与百度代工自动驾驶计算平台ACU
伟创力基于Orin平台的MARS III自动驾驶域控制器
更多佐思报告
| 云端和AI | |
| 车云 | |
| AI大模型 | |
| 智驾系统集成和应用层 | |
| 自动驾驶应用框架 | |
| 自动驾驶算法和系统 | |
| 感知 | |
| 智舱系统集成和应用层 | |
| 智能座舱应用框架 | |
| 座舱显示 | |
| 座舱交互 | |
| 座舱互联娱乐与生态 | |
| 座舱其他 | |
| OS和支撑层 | |
| SDV框架 | |
| 基础软件/系统平台 | |
| 信息安全/功能安全 | |
| 电子电气架构层 | |
| E/E架构框架 | |
| 智驾域 | |
| 座舱域 | |
| 8295座舱域控制器拆解 | |
| 车控域 | |
| 通信/网络域 | |
| 跨域融合 | |
| 区域和中央计算 | |
| 其他芯片 | |
| 动力层 | |
| 动力 | |
| 能源 | |
| 其他 | |
| 机械层 | |
| 底盘/执行 | |
| 其他宏观 | |
| 车型平台 | |
| 出海 | |
| 政策、标准、准入 | |
| AI机器人 | |
「佐思研究月报」
「联系方式」
声明: 本文由入驻搜狐公众平台的作者撰写,除搜狐官方账号外,观点仅代表作者本人,不代表搜狐立场。
回首页看更多汽车资讯
大白兔
0大白兔 小子
0